Mid-360 快速配置指南
Mid-360 快速配置指南
1.安装 Livox-SDK2
1 | $ git clone https://github.com/Livox-SDK/Livox-SDK2.git |
(卸载SDK:
1 | $ sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_* |
2.安装livox_ros_driver2
clone到[work_space]/src/路径下
1 | git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2 |
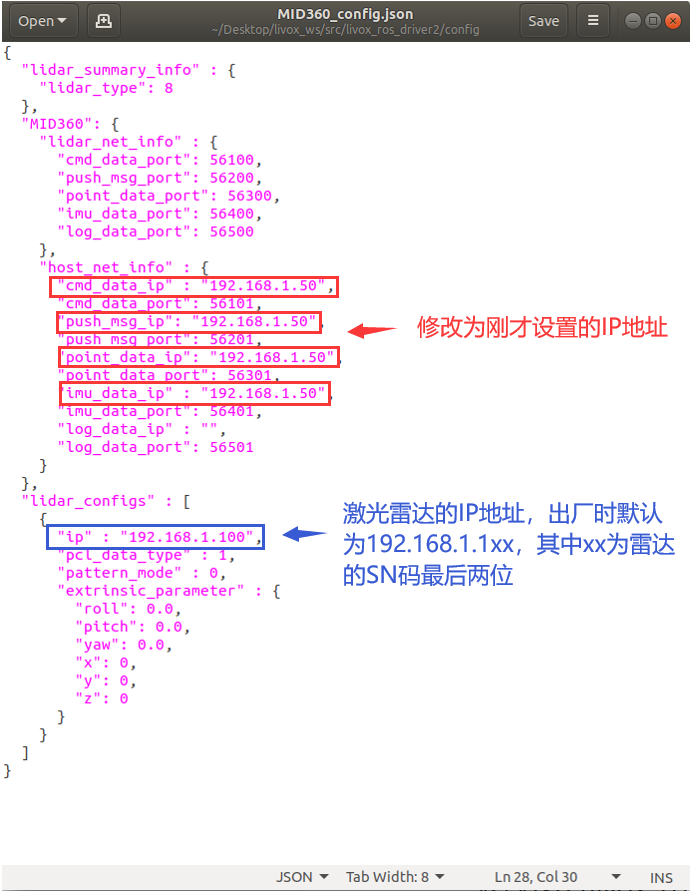
3.连接Mid-360与PC
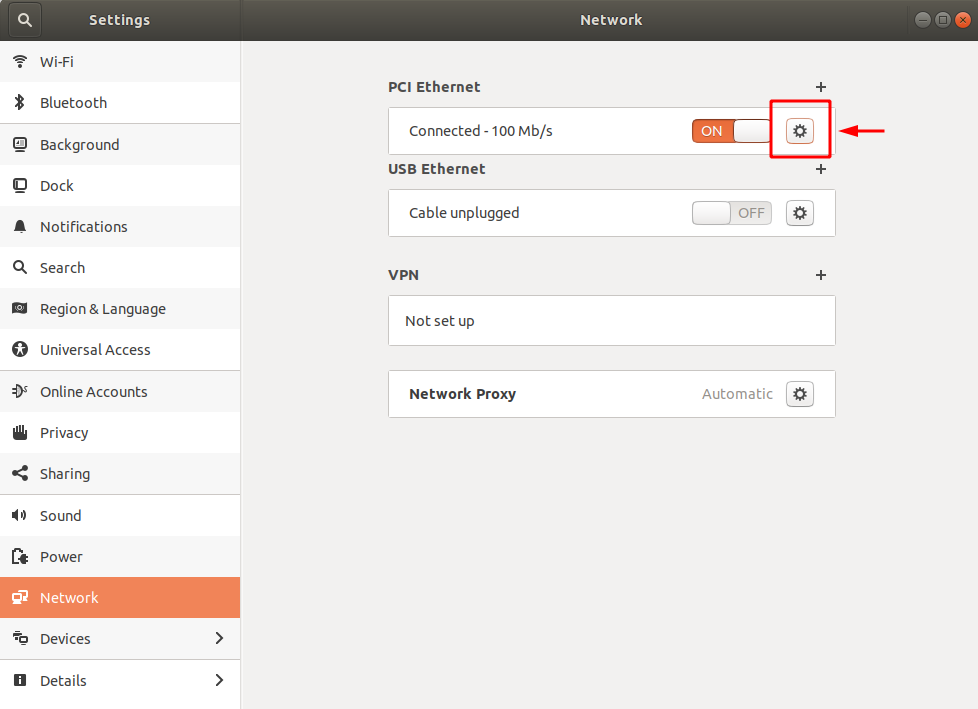
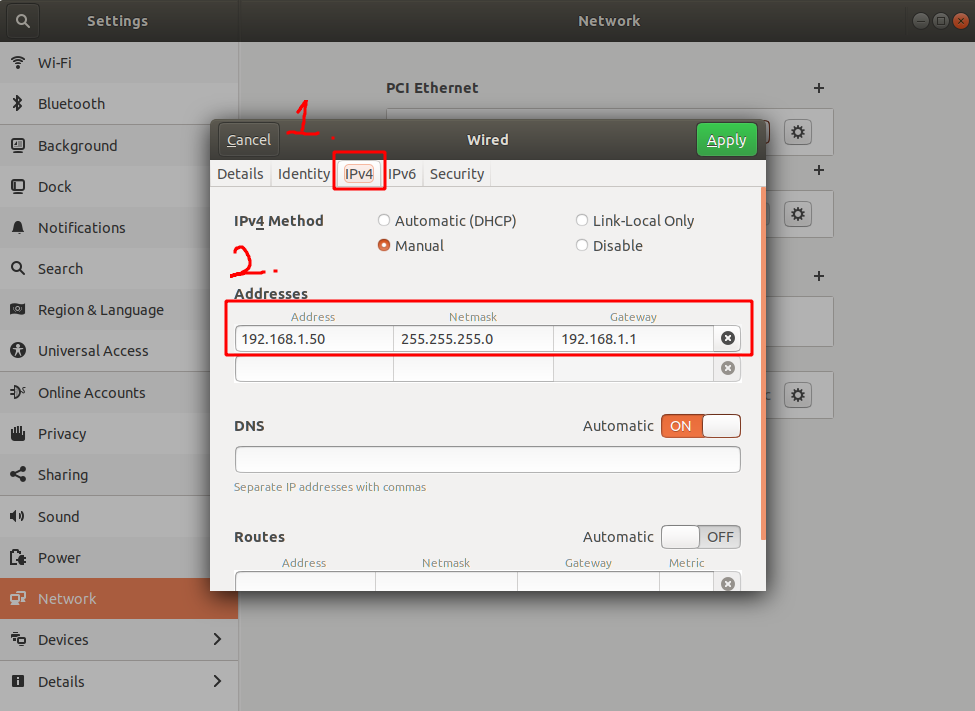
修改/src/livox_ros_driver2/config/MID360_config.json中对应的IP地址
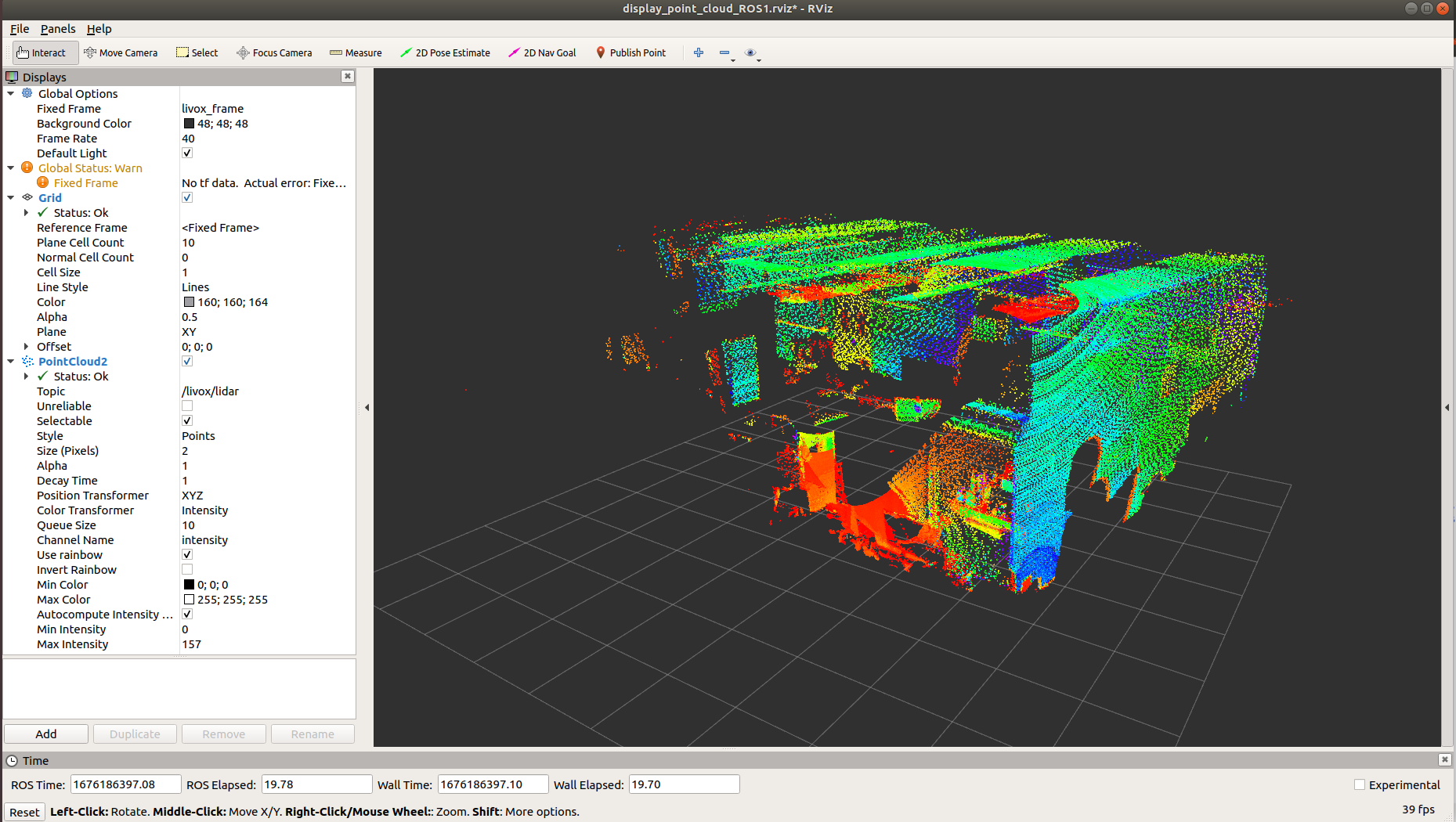
4.运行launch文件
1 | roslaunch livox_ros_driver2 rviz_MID360.launch |
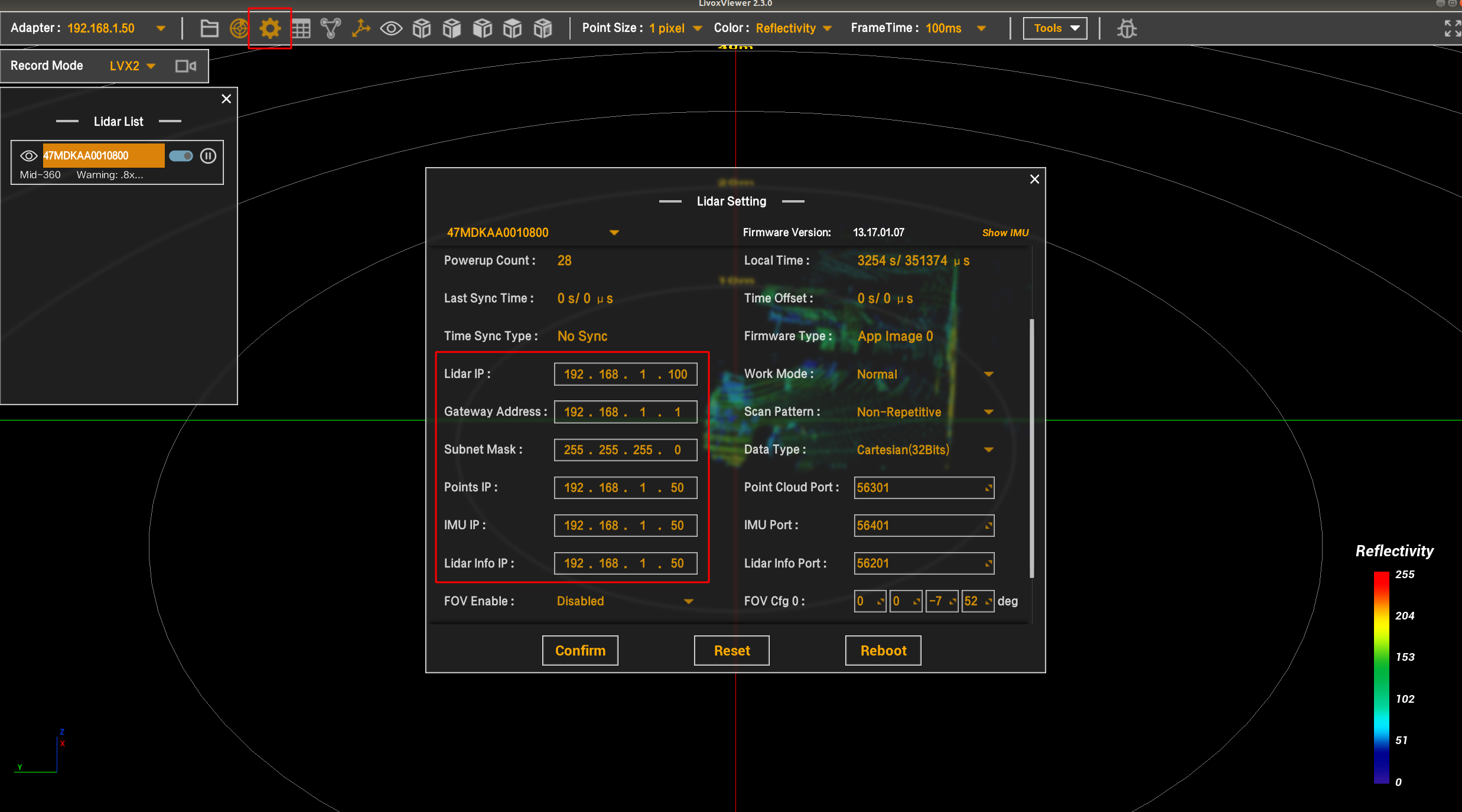
5.可选下载: Livox点云可视化软件Livox Viewer 2 - Ubuntu
下载完成解压后 ./LivoxViewer2.sh直接运行,可以在软件中查看一些关于Lidar的信息
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 JiaFan's Blog!
评论
Va